Schéma Cinématique et Graphe
Modéliser un mécanisme, c'est trouver un modèle, une représentation simplifiée d'un ensemble de pièces mécaniques. Ce modèle doit permettre une compréhension rapide du fonctionnement.
Classes d’équivalence
Définition
C’est un groupe de pièces (classe) qui répond aux principes de réflexivité, transitivité et symétrie Ici la relation considérée est = «est sans mouvement relatif possible avec », soit et trois pièces de la classe :
On a forcément: puisque il s'agit de corps indéformables (réflexivité).
De plus, si alors (symétrie).
Enfin, si et , alors (transitivité).
On appelle classe d’équivalence un ensemble de pièces qui sont immobiles les unes par rapport aux autres donc en encastrement durant la phase d’étude.
On ne classera pas les éléments déformables (ressorts, soufflets…) durant la phase de fonctionnement étudiée dans une classe en effet ces éléments pouvant appartenir à 2 classes d'équivalence à la fois.
Méthode :
Repérer les classes puis les colorier d’une même couleur
Affecter chaque composant aux groupes :
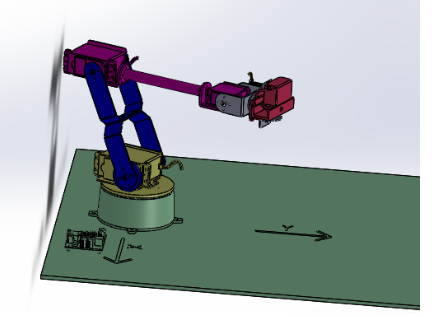
Bras de robot.
Recherche des liaisons entre les classes
Identifier la nature des liaisons existant entre les groupes :
Exemple
| Classes en contact | Nature des contacts | Mouvement relatifs possibles | Liaisons |
|---|---|---|---|
| et | Surface cylindrique | Rotation + translation sur | Pivot glissant d'axe |
| et | Surfaces planes + cylindriques | Rotation autour de | Pivot avec |
| et | Ponctuel | Tous sauf une translation sur | Ponctuelle de normale |
Tracé du graphe de structure
Le graphe de structure est un outil d’analyse. Réaliser le graphe de structure :
Les différentes classes d’équivalence sont représentées par des bulles.
Les liaisons entre les classes sont représentées des liens On indique la désignation complète de la liaison et on peut reporter son schéma.
Exemple
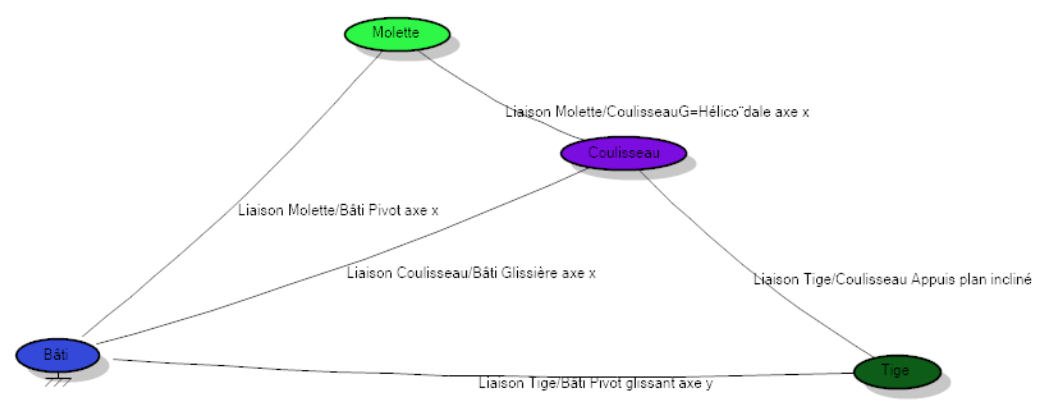
Graphe de structure.
Caractéristiques du graphe
Définition
Graphes ouverts : Graphes dont les liaisons ne forment pas de boucles.
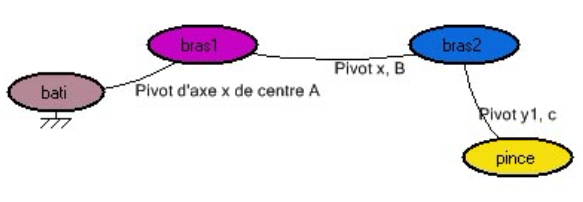
Exemple de graphe ouvert.
Définition
Graphes fermés simples : Graphes dont les liaisons forment une seule boucle.

Exemple de graphe fermé simple.
Définition
Graphes fermés complexes : Graphes dont les liaisons forment des boucles nommés "cycles indépendants".

Exemple de graphe fermé complexe.
Tracé du schéma cinématique
Il faut placer les liaisons sur un croquis en respectant (attention une liaison à couleurs, respecter cela)
Ensuite il faut relier les liaisons en respectant les classe d'équivalences et leurs code couleur.
Exemple
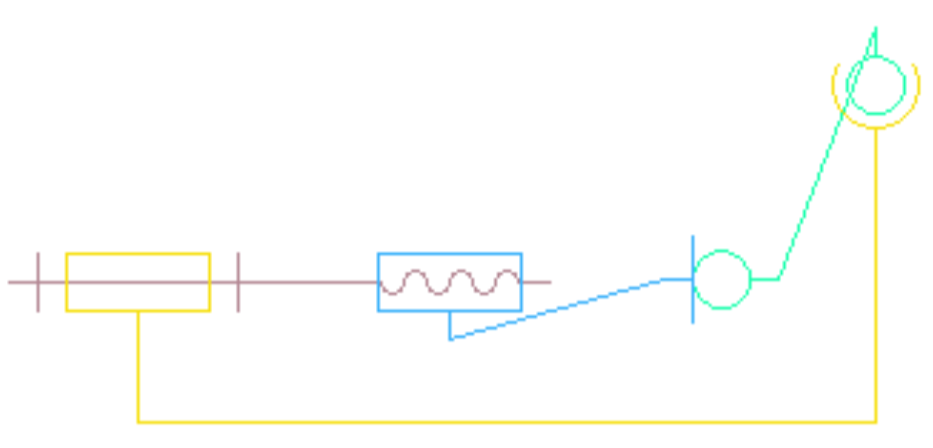
Schéma cinématique.
Commentaires
Réseaux sociaux



