Cinématique tracé de Positions
Mouvement plan de solides
Définition
Un solide exécute un mouvement plan lorsque tous les points qui le compose se déplacent dans des plans parallèles entre eux.
Exemple
tous solide qui glisse sur une surface plane : galet de hockey, mais pas boule de pétanque (roule)
Remarque
La plupart des mouvements rencontrés en technologie sont des mouvements plans (même si il ne se déroulent pas dans le même plan mais des plans parallèles).
Translation
Définition
Un solide se déplace en translation si n’importe quelle ligne tracée entre 2 points du solide reste constamment parallèle à sa position initiale.
Exemple
flèche de la souris sur l’écran d’un ordinateur
Définition
Un solide se déplace en translation rectiligne si tous les points se déplacent suivant des lignes parallèles entre elles (si les trajectoires de tous les points sont des droites parallèles).
Exemple
mouvement de la tige d’un vérin par rapport au corps du vérin
Propriété
Les mouvements de translation non rectilignes sont des translations curvilignes (ex : translation circulaire).
Exemple
Équerre de table à dessin
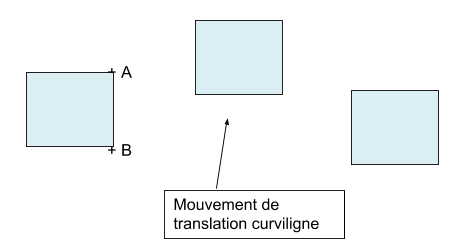
Translation curviligne d'un rectangle
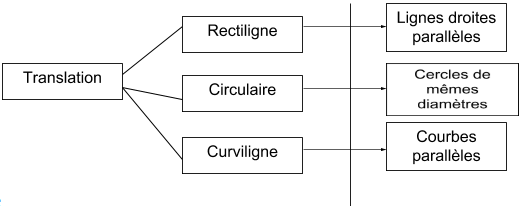
Description de translations.
Rotation autour d’un axe fixe
Définition
Un solide se déplace en rotation si tous les points du solide décrivent des cercles centrés sur l’axe fixe.
Exemple
le rotor d’un moteur électrique est animé d’un mouvement de rotation autour de l’axe du moteur, dans un repère lié au moteur
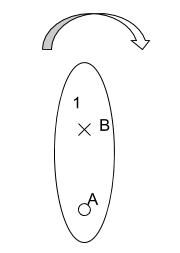
Rotation d'un solide.
Propriété
Au cours d’un mouvement de rotation la vitesse des points appartenant au solide (réellement ou fictivement) restent à tout instant parallèles entre eux, de norme différente et perpendiculaire au rayon formé entre le point d’expression et le centre de rotation. Celle-ci est régie par la relation du champ des vecteurs vitesses qui s’exprime telle :
le module du vecteur taux de rotation :Avec la vitesse de rotation en tour par minute du solide.
champ des vitesses :
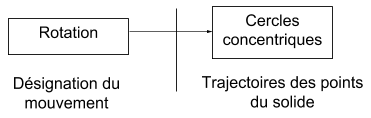
Description de rotation.
Mouvement plan général
Définition
Un mouvement plan qui n’est ni une translation, ni une rotation est appelé mouvement plan général (mais forcément une combinaison des 2).
Synthèse du mouvement
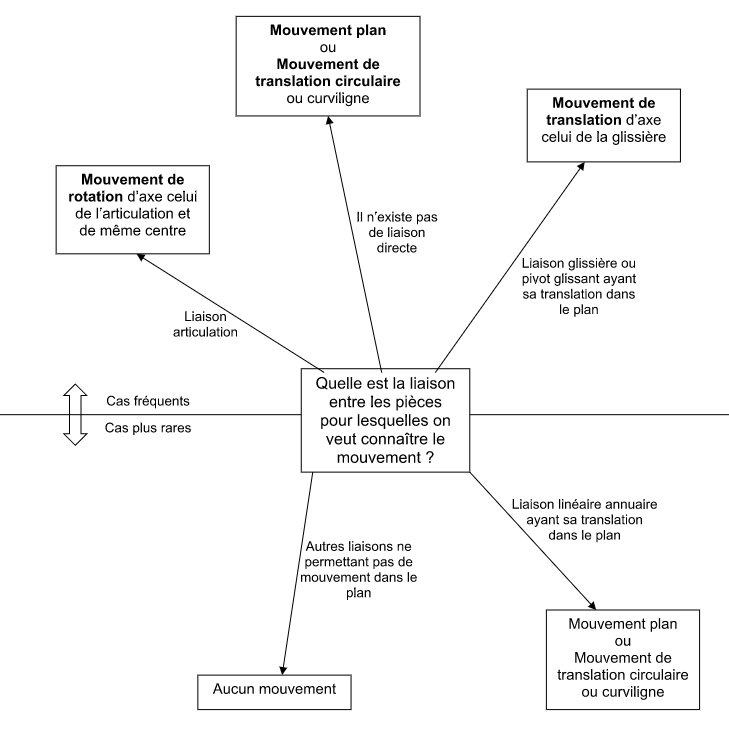
Synthèse du mouvement

Une liaison articulation peut être :
Un pivot ou un pivot glissant ayant sa rotation dans le plan
Une rotule
Une linéaire annulaire n’ayant pas sa translation dans le plan
Commentaires
perspicace
0
Merci pour ce cours simplifié
perspicace
0
en fait j comprends juste pas la différence entre translation et translation rectiligne
Réseaux sociaux



