Cinématique
Domaine de validité

Les outils suivant ne fonctionnent que dans le cadre des hypothèses suivantes :
Solides indéformables (si ils se déforment il faudrait tenir compte de la vitesse de déformation)
Vitesses éloignées de celle de la lumière dans le vide (uniformité de l’espace et du temps)
Problèmes à symétrie plane
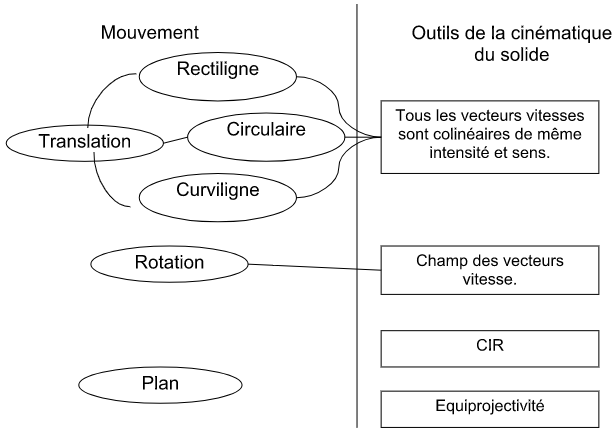
A chaque type de mouvement correspond des outils particuliers. Le but de ces outils est que en connaissant le type de mouvement et la vitesse d’un de ses points, de permettre de déterminer la vitesse de n’importe quel autre point du solide.
Champs des vecteurs vitesse
Définition
Le vecteur vitesse instantané d’un point appartenant à un solide en rotation par rapport à un solide est tel que :
Son point d’application est
Sa direction est tangente en à la trajectoire de (tangent à la circonférence ou perpendiculaire au rayon pour un mouvement de rotation).
Le sens est donné par le sens du mouvement.
Le module est égal à
Avec:
en m/s,
vitesse de rotation en rad/s,
rayon en m.
Exemple
Hélice d’avion de modélisme
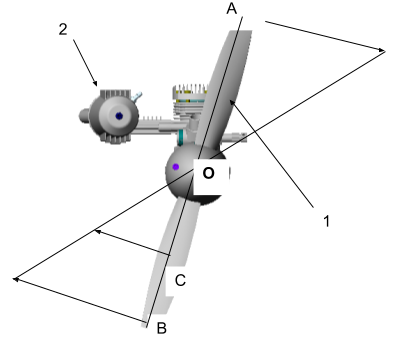
Hélice d'avion
Le mouvement de l’hélice par rapport au moteur est une rotation de centre . Le repère de référence est lié à l’avion.
est la vitesse de rotation : trs/min
Rayon d’hélice : cm
Résolution:
rad/s (transforme les tour/min en rad/s).
Composition des vitesses
Propriété
Soient trois solides on peut écrire :
Equiprojectivité
Propriété
Soient deux points et appartenant au même solide en mouvement plan ( est solide de référence). Soient et les vecteurs vitesses correspondants.
Ces vecteurs vitesses ont la propriété suivante :
La projection orthogonale du vecteur sur la droite est égale à la projection orthogonale du vecteur sur la même droite (équiprojectivité). Autrement dit, le produit scalaire des vecteurs et est égal au produit scalaire des vecteurs et .
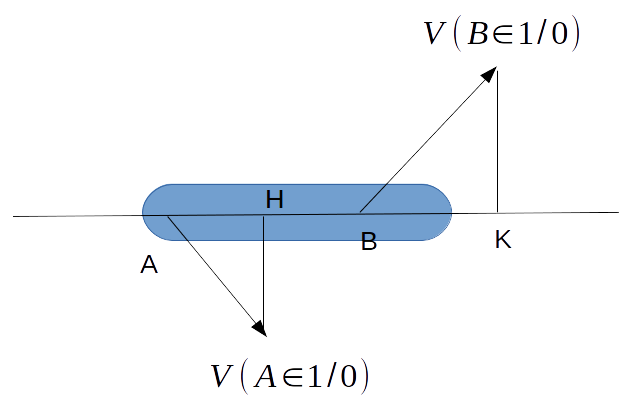
L'equiprojectivité.

Conséquence : Pour un solide en mouvement plan, il suffit de connaître complètement une vitesse et la direction d’une autre pour déterminer toutes les vitesses de ce solide.
Le centre instantané de rotation : CIR (axoïde du mouvement)
Propriété
Tout mouvement plan est assimilable à un mouvement de rotation dont le centre changerait de position à chaque instant. Les lieux des positions de ce centre se nomme la base du mouvement.
Remarque : C’est le lieu des torseurs cinématiques de résultante nulle.
Comme dans le mouvement de rotation le centre se trouve à l’intersection des perpendiculaires aux vecteurs vitesses. Il suffit donc de connaître directions de vitesses pour déterminer le centre qui nous donnera ainsi les directions de toutes les autres vitesses.
Remarques :
Les mouvements doivent d’abord vous permettre de déterminer les directions de vitesses des solides en translation et rotation.
Le CIR ne permet que de déterminer les directions des vitesses des solides en mouvement plan.
On nomme le lieu (la trajectoire) du CIR par rapport au repère fixe : la base.
On nomme le lieu du CIR par rapport au repère mobile : la roulante.
Méthode
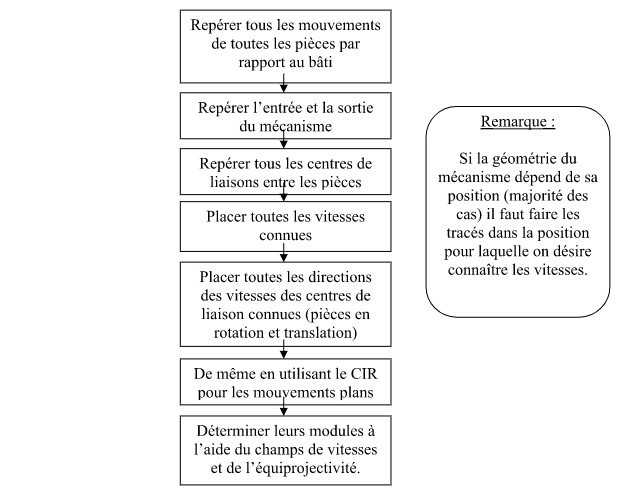
Méthode pour la cinématique.
Méthode pour la cinématique.
Commentaires
katarina
3
d'ou vient le 0,075 ?
Réseaux sociaux



