Liaisons
Modéliser un mécanisme, c'est trouver un modèle, une représentation simplifiée d'un ensemble de pièces mécaniques. Ce modèle doit permettre une compréhension rapide du fonctionnement.
Le solide
Le solide, en modélisation mécanique, est considéré comme indéformable quelles que soient les actions exercées sur celui-ci pendant son étude. Il peut être composé d’une pièce, d’un ensemble de pièce ou d’un mécanisme complet
Exemple
un véhicule, une suspension de véhicule, un axe de roue...
Degrés de liberté d’un solide
Propriété
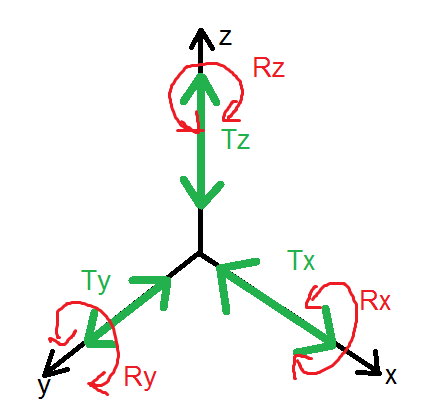
Un solide libre dans l’espace possède degrés de liberté:
translations
rotations
Définition
Si l’axe est la direction principale du solide on peut nommer les mouvements :
= avance,
= dérive,
= ascension,
= roulis,
= tangage,
= lacet.
Propriété
Ils permettent au solide d’occuper n’importe quelle position dans n’importe quelle orientation de l’espace.
Degré de liberté.
Propriété
Pour repérer spatialement un solide il faut donc déterminer avec coordonnées la position d’un de ces points et angles pour son orientation. Ces angles sont nommés angles d’Euler :
: La précession (premier angle)
: La nutation (deuxième angle)
: La rotation propre (troisième angle)
Propriété
Une liaison entre solides limite les degrés de liberté permissibles entre eux.
Degrés de liaisons
Définition
On appelle degré de liaison le nombre de degré de liberté supprimé par une liaison.
Les différents types de contact
On analyse les surfaces géométriques de contact entre pièces.
Propriété
En théorie on a trois types de contact :
De dimension : Le contact ponctuel (selon un point)
De dimension : Le contact linéique (selon une ligne)
De dimension : Le contact surfacique (selon une surface plane ou courbe)
Dans la réalité les solides sont déformables alors il n’existe que des contacts surfaciques, c’est l’une des principale différence entre le modèle proposé et la réalité.
Liaisons élémentaires de 2 solides
Les liaisons élémentaires (ou simples) sont les liaisons les plus courantes qui peuvent unir 2 pièces d’un mécanisme.
On les représente à l’aide de symboles (voir tableau) qui permettent de modéliser un mécanisme sous la forme d’un schéma cinématique (comme on modélise un circuit électrique par un schéma électrique).
Définition
Ces liaisons sont dites holonomes car elles empêchent certains mouvements.
Définition
Une liaison est dite parfaite lorsque les hypothèses suivantes sont vraies (ou relativement vraies) :
Elles sont sans frottement
Elles ne comportent pas de jeux
Exemple
Bras de robot.
Pour reconnaître une liaison on analyse les mobilités et les mouvements relatifs possibles. Il faut définir un repère qui permet d’exprimer facilement les propriétés du contact :
Un centre de liaison qui est un point privilégié de la géométrie du contact (point de contact ou point de symétrie).
Un axe principal (axe de symétrie de la surface de contact).
Des axes complémentaires pour terminer le repère orthonormé direct.
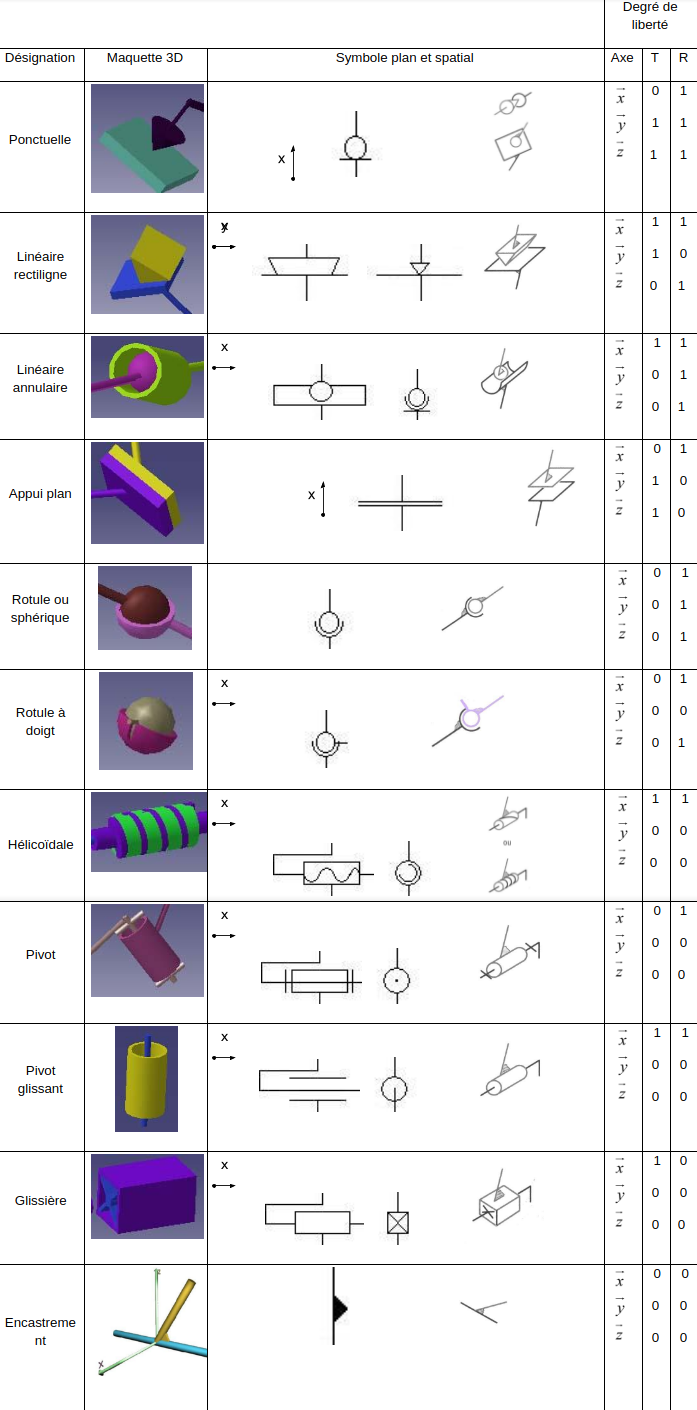
Tableau des liaisons
Commentaires
Réseaux sociaux



